[게임수학]
- 2차원 평면에서 (x,y) 를 90˚ 만큼 회전시키면 (-y,x)이고, -90˚ 회전시키면 (y,-x) 이다.
복소 평면에서 임의의 복소수 (a,b)에 단위 복소수 (0,1)를 곱하면 (-b,a)가 된다. 즉, 90˚ 회전이 이루어진다.
- 사영 공간의 좌표를 클립 좌표라고 부른다
- 삼각형 클리핑 : 월드공간의 좌표를 사용하지 않고 투영행렬을 적용한 후의 좌표를 사용
'이론 > 게임수학' 카테고리의 다른 글
| [게임수학] 강의 소개 및 연산 (2) (0) | 2023.01.07 |
|---|---|
| [게임 수학] 강의 소개 및 연산 (1) (0) | 2023.01.07 |
| 회전행렬이 만들어지는 과정 (0) | 2022.07.09 |
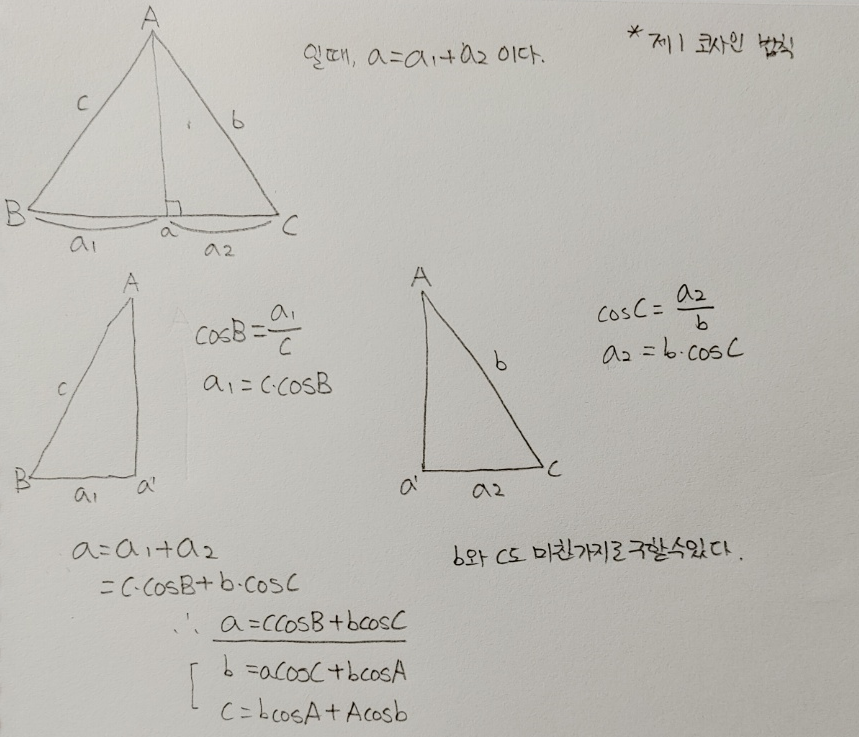
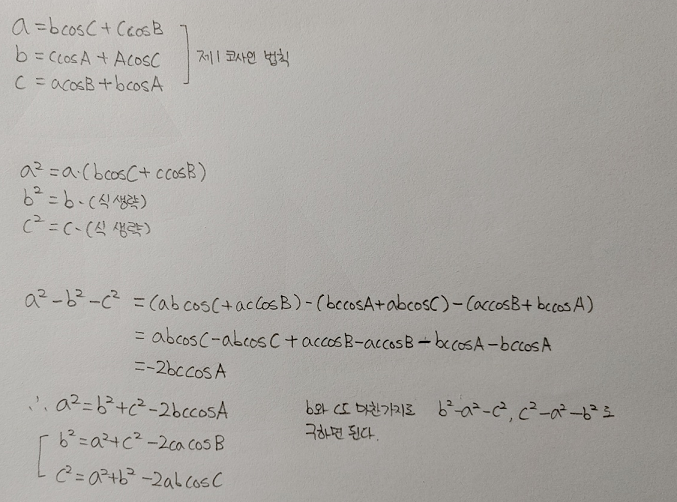
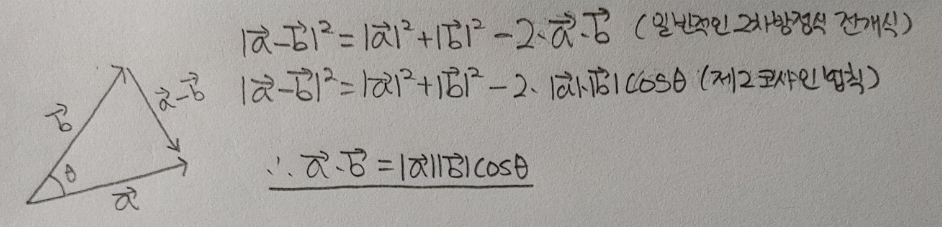
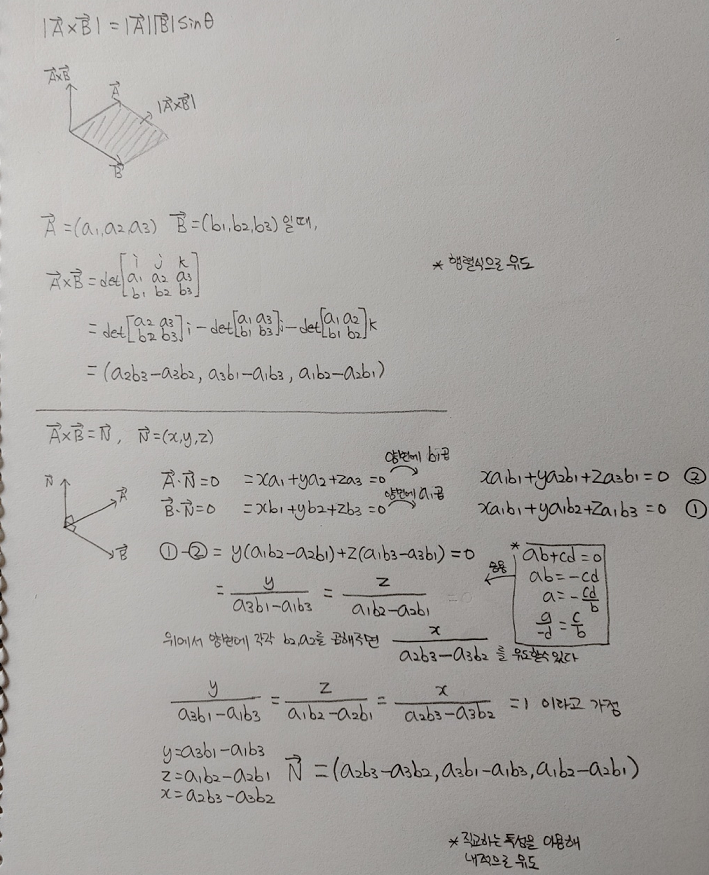
| 벡터의 내적과 외적 (+코사인 법칙) (0) | 2022.07.08 |
| 게임 개발에 사용하는 행렬 (0) | 2022.07.08 |